成像模型 (Camera_Projection)
参考自课件:
- (Camera Projection – 1)[https://www.cse.psu.edu/~rtc12/CSE486/lecture12.pdf]
- (Camera Projection – 2)[https://www.cse.psu.edu/~rtc12/CSE486/lecture13.pdf]
- https://mp.weixin.qq.com/s/qxLgnWELQ2ZI4MyreXGOYQ
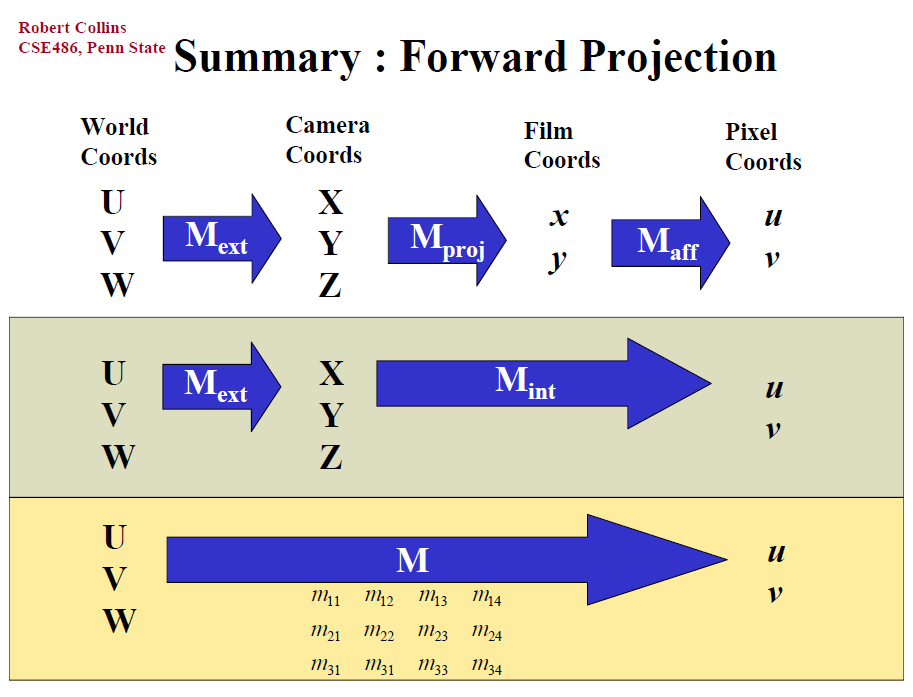
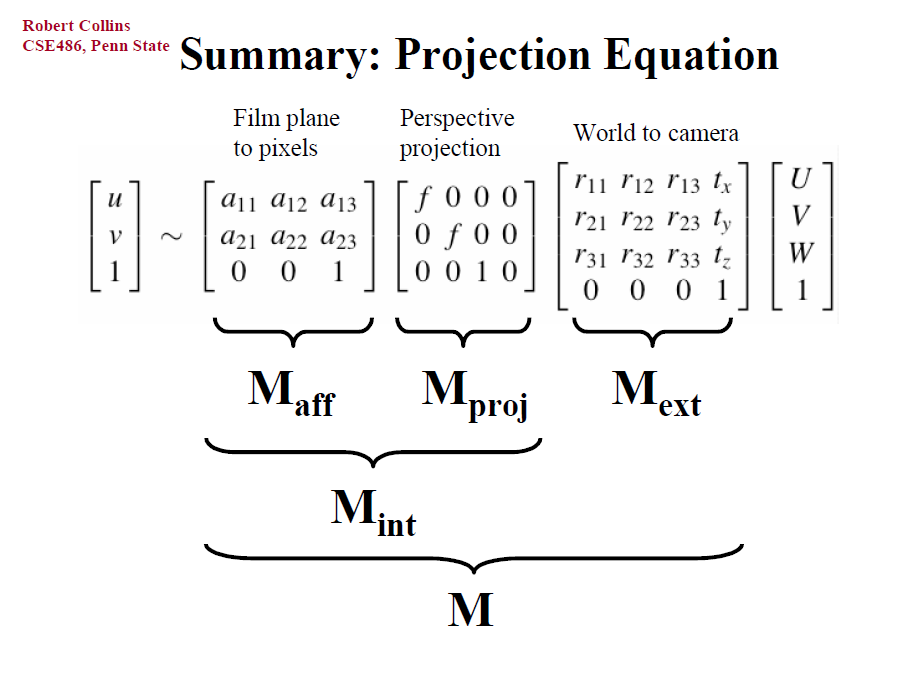
我们需要一个数学模型来描述如何将3D世界坐标系中的点 (U,V,W) 投影到2D图片坐标系(u,v)中。
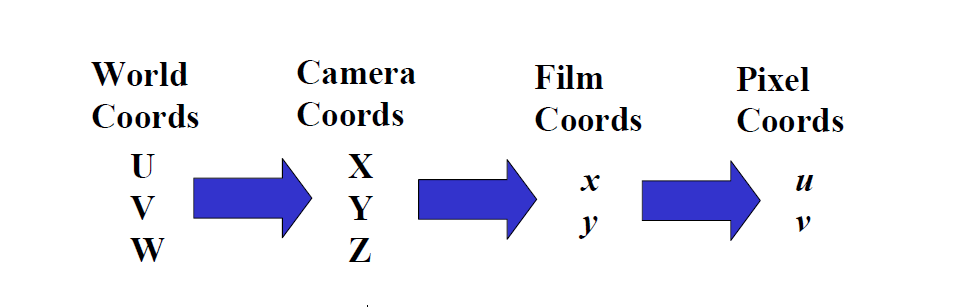
Camera Coords to Film Coords (3D to 2D)
相机坐标系 Camera Coords (X,Y,Z) to 画布坐标系 Film Coords (x,y):
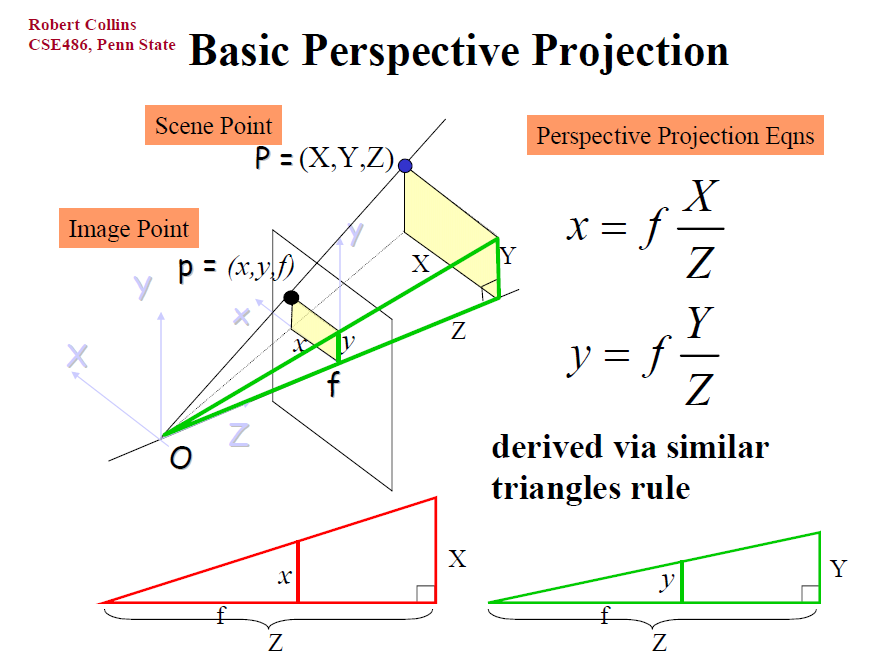
对于相机坐标系中的点(X,Y,Z),其中Z是从相机原点到该点的距离。已知焦距f,因此,相机坐标系到画布坐标系的比例关系为 f/Z。
对应的,我们想求此点在画布坐标系中的横纵坐标(x,y),只需要按比例缩放:
x=X \cdot \frac{f}{Z} = f\frac{X}{Z} y=Y \cdot \frac{f}{Z} = f\frac{Y}{Z}因此, 变换方程可以写作
\left[\begin{array}{c}
x\\
y \\
z
\end{array}\right]=\left[\begin{array}{llll}
f & 0 & 0 & 0 \\
0 & f & 0 & 0 \\
0 & 0 & 1 & 0
\end{array}\right]\left[\begin{array}{c}
X \\
Y \\
Z \\
1
\end{array}\right]
其中z 为虚构的第三维坐标, Camera Coords (X,Y,Z,1)中的1为预留的位置偏移量。
World Coords to Camera Coords (3D to 3D)
世界坐标系 World Coords (\mathbf{P}_{\mathrm{W}}) 到相机坐标系 Camera Coords (\mathbf{P}_{\mathrm{C}}) 只需要简单的旋转\mathbf{R}和偏移\mathbf{C}.
因此,变换方程可以写作
\begin{gathered}
\mathbf{P}_{\mathbf{C}}=\mathbf{R}\left(\mathbf{P}_{\mathbf{W}}-\mathbf{C}\right) \\
\left(\begin{array}{l}
\mathrm{X} \\
\mathrm{Y} \\
\mathrm{Z} \\
1
\end{array}\right)=\left(\begin{array}{llll}
\mathrm{r}_{11} & \mathrm{r}_{12} & \mathrm{r}_{13} & 0 \\
\mathrm{r}_{21} & \mathrm{r}_{22} & \mathrm{r}_{23} & 0 \\
\mathrm{r}_{31} & \mathrm{r}_{32} & \mathrm{r}_{33} & 0 \\
0 & 0 & 0 & 1
\end{array}\right)\left(\begin{array}{llll}
1 & 0 & 0 & -c_{x} \\
0 & 1 & 0 & -c_{y} \\
0 & 0 & 1 & -c_{z} \\
0 & 0 & 0 & 1
\end{array}\right)\left(\begin{array}{c}
\mathrm{U} \\
\mathrm{V} \\
\mathrm{W} \\
1
\end{array}\right)
\end{gathered}
其中 偏移\mathbf{C}=(c_{x},c_{y},c_{z})。
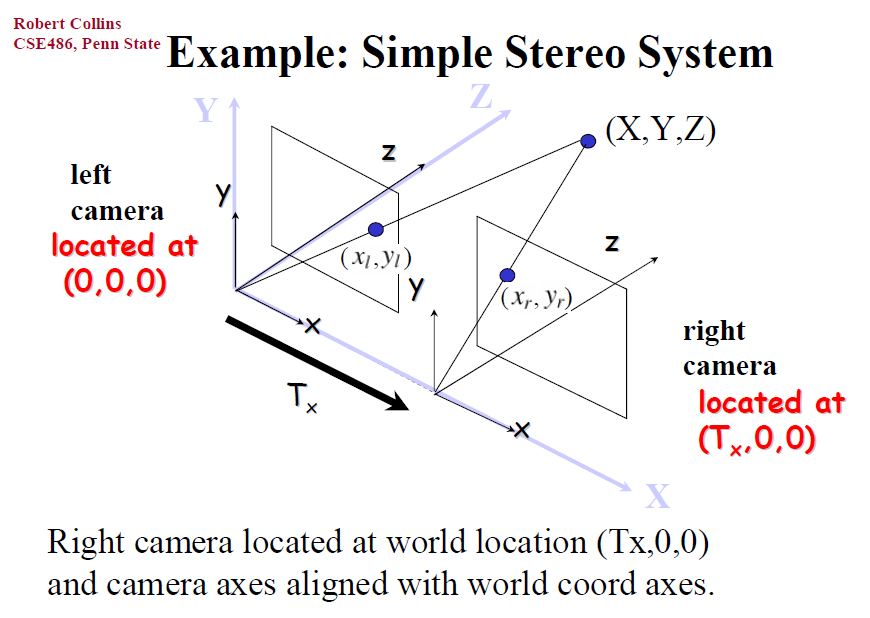
偏移的例子: 两个相机,一个在(0,0,0),另一个在(\mathbf{T}_x,0,0), 对于点(X,Y,Z)的观测

通常写法
\mathbf{R}\cdot(\mathbf{P}_W-\mathbf{C})\\ = \mathbf{R}\mathbf{P}_W-\mathbf{R}\mathbf{C}\\ = \mathbf{R}\mathbf{P}_W-\mathbf{T}\\ \left( \begin{array}{c} \mathrm{X}\\ \mathrm{Y}\\ \mathrm{Z}\\ 1\\ \end{array} \right) =\left( \begin{matrix}{l} \mathrm{r}_{11}& \mathrm{r}_{12}& \mathrm{r}_{13}& 0\\ \mathrm{r}_{21}& \mathrm{r}_{22}& \mathrm{r}_{23}& 0\\ \mathrm{r}_{31}& \mathrm{r}_{32}& \mathrm{r}_{33}& 0\\ 0& 0& 0& 1\\ \end{matrix} \right) \left( \begin{matrix} 1& 0& 0& -c_x\\ 0& 1& 0& -c_y\\ 0& 0& 1& -c_z\\ 0& 0& 0& 1\\ \end{matrix} \right) \left( \begin{array}{c} \mathrm{U}\\ \mathrm{V}\\ \mathrm{W}\\ 1\\ \end{array} \right) \\ =\left( \begin{matrix} \mathrm{r}_{11}& \mathrm{r}_{12}& \mathrm{r}_{13}& t_x\\ \mathrm{r}_{21}& \mathrm{r}_{22}& \mathrm{r}_{23}& t_y\\ \mathrm{r}_{31}& \mathrm{r}_{32}& \mathrm{r}_{33}& t_z\\ 0& 0& 0& 1\\ \end{matrix} \right) \left( \begin{array}{c} \mathrm{U}\\ \mathrm{V}\\ \mathrm{W}\\ 1\\ \end{array} \right)Film Coords to Pixel Coords (2D to 2D)
画布坐标系 到 像素坐标系: 仿射变换 Affine Transformation
主要有两个方面
- 偏移量 offset: o
- 尺度变换 scales: s
u=\frac{1}{\mathrm{~s}_{\mathrm{x}}} f\cdot x+o_{x} =\frac{1}{\mathrm{~s}_{\mathrm{x}}} f \frac{X}{Z}+o_{x} \\
v=\frac{1}{\mathrm{~s}_{\mathrm{y}}} f\cdot y+o_{y}=\frac{1}{\mathrm{~s}_{\mathrm{y}}} f \frac{Y}{Z}+o_{y}
注意,方向 可能会变化,此时,需要考虑增加正负号。
总结