神经辐射场 (NeRF) – 下
NeRF:
- 网站: https://www.matthewtancik.com/nerf
- 论文:https://arxiv.org/pdf/2003.08934.pdf
- 代码:https://github.com/bmild/nerf
参考文献:
基本流程
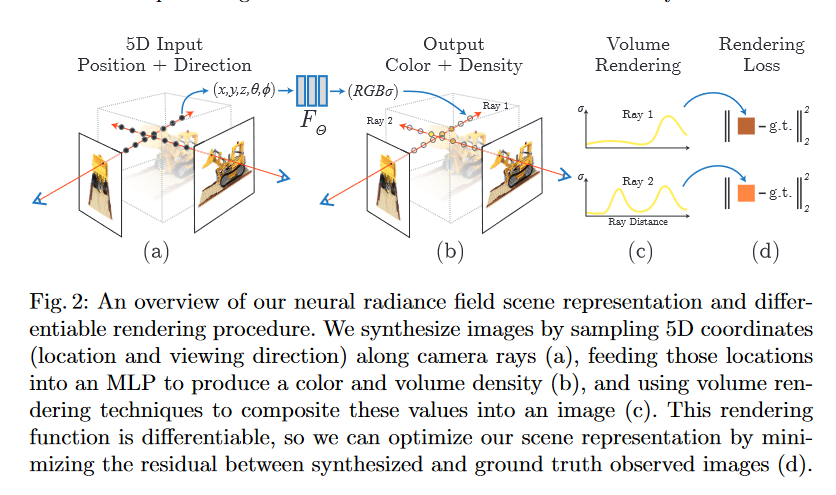
NeRF的输入是一个五维向量: (物体)空间点的位置 \mathbf{x}=(x,y,z) 和 (相机)观测方向 \mathbf{d}=(\theta, \phi)。输出是体密度(volume density, \sigma,可以理解为透明度)和基于观测角度的物体的空间点色彩 \mathbf{c}=(r,g,b)。
通过对每一束从相机射出的光线,计算途径空间点的色彩 \mathbf{c} 和体密度 \sigma。然后基于获得的空间点的色彩和体密度,进行体素渲染 (Volume Rendering)得到预测的像素值。
NeRF的网络模型(以下简称 NeRF-Model) 实现的功能实际上是 F_{\Theta}:(\mathbf{x}, \mathbf{d}) \rightarrow(\mathbf{c}, \sigma)。实现了从 【空间点位置 + 观测角度】 到 【空间点色彩+体密度】 的映射。
辐射场体素渲染
辐射场体素渲染(Volume Rendering with Radiance Fields)
对于任意一条从相机射出的光线(ray,\mathbf{r}),我们可以通过 NeRF-Model 去预测对应路径上的所有空间点 \mathbf{x}的透明度 \sigma(\mathbf{x}) 和 色彩 \mathbf{c}(\mathbf{x})。
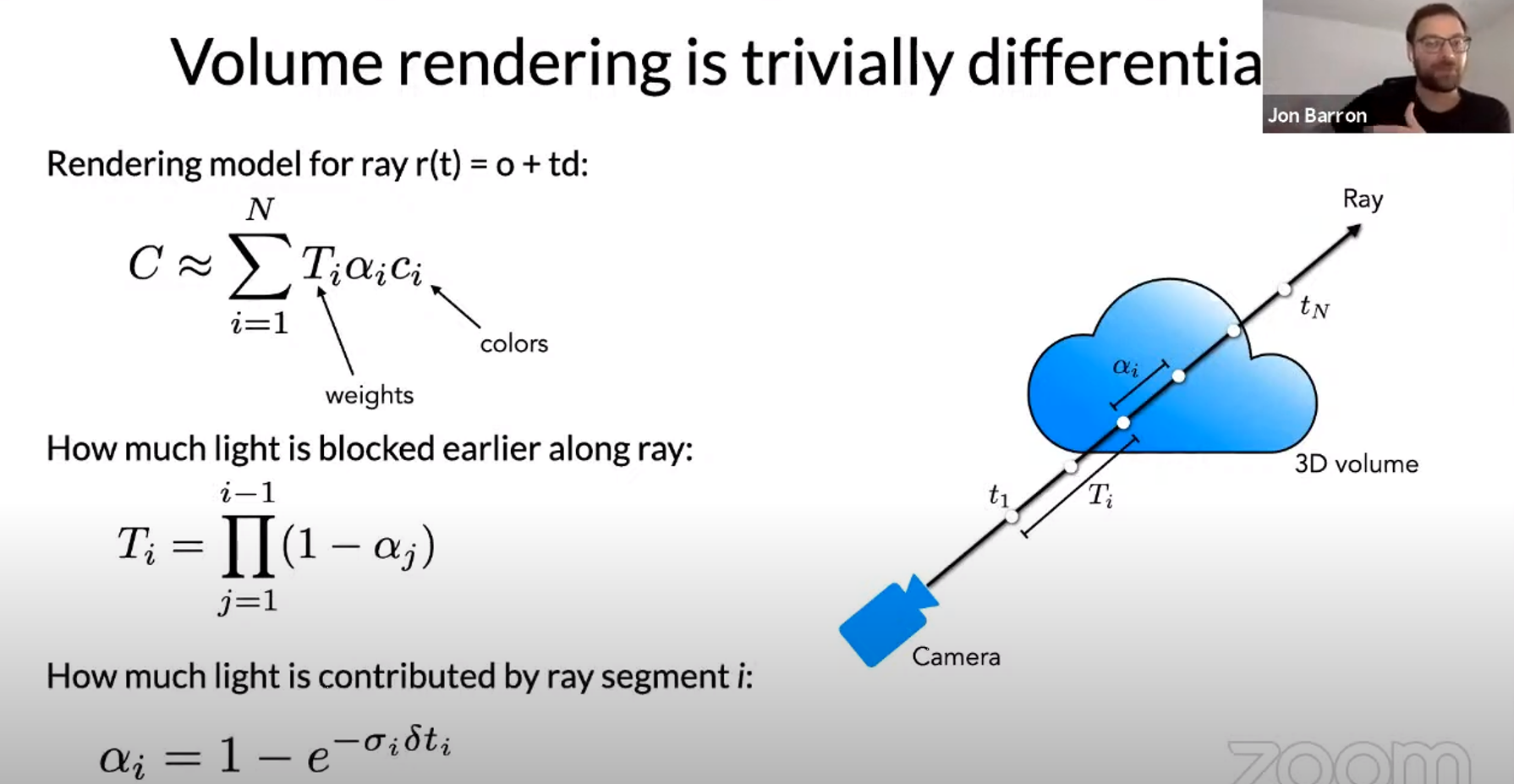
这里我们假设有一条光线 \mathbf{r}(t)=\mathbf(o)+t\mathbf(o),这条光线在空间中的范围是 t_n 到 t_f。对于任意一点 t, 我们可以通过 NeRF-Model 计算出它的透明度 \sigma(t) 和 色彩 \mathbf{c}(t)。对于这条光线上的所有点 dt,我们可以通过积分的形式,去累计他们的值,得到投射到图片上的像素值C(\mathbf{r})。
C(\mathbf{r})=\int_{t_{n}}^{t_{f}} T(t) \sigma(\mathbf{r}(t)) \mathbf{c}(\mathbf{r}(t), \mathbf{d}) d t, \text { where } T(t)=\exp \left(-\int_{t_{n}}^{t} \sigma(\mathbf{r}(s)) d s\right)T(t) 是射线从 t_n 到 t_f 这一段路径上的累积透明度,可以被理解为这条射线从 t_n 到 t_f 一路上没有击中任何粒子的概率。
\begin{align*} T(t+dt) &= T(t) \times (1-\sigma(t)dt)\\ T(t)+T'(t)dt &=T(t)-T(t)\sigma(t)dt\\ \frac{T^{\prime}(t)}{T(t)} dt &=-\sigma(t) d t\\ log(T(t)) &=-\int_{t_{0}}^{t} \sigma(s) d s\\ T(t)&=exp(-\int_{t_{0}}^{t} \sigma(s) d s)\\ \end{align*}推导如下:
假设T^*(t)=\sigma(t)dt 定义为为在 t 点击中粒子的概率(瞬时透明度)。则在t 没有点击中粒子的概率为 1-T^*(t)=1-\sigma(t)dt。
因此,在 t+dt 点前没有没有被击中的概率 T(t+dt) 为, T(t) (一路上没有击中任何粒子的概率) 和 1-\sigma(t)dt (在t 没有点击中粒子) 的乘积:
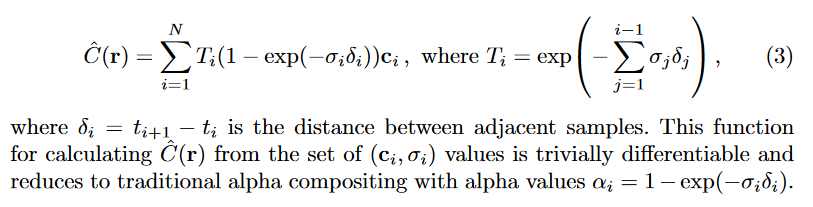
离散化的表示形式:
优化神经辐射场
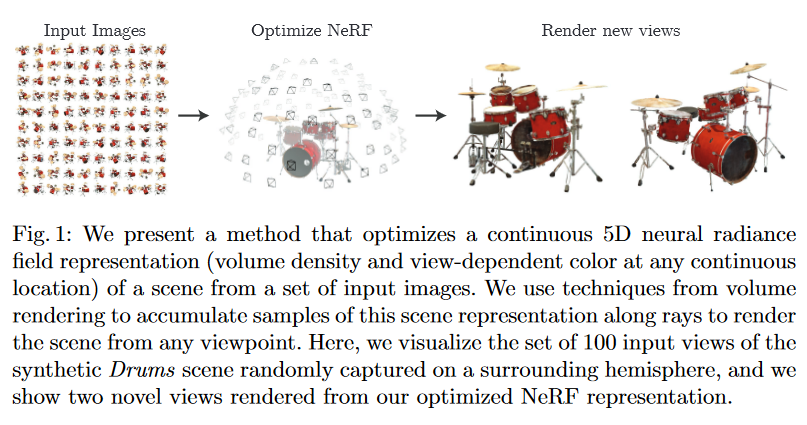
概述: 在训练阶段,输入一系列(如100张)图片和他们的拍摄相机角度、内参、场景边界(可以使用COLMAP获得)。 然后优化NeRF网络(几层MLP)。训练过的NeRF,可以实现任意角度的渲染。
两个提升
两项设计帮助提升高分辨率复杂场景的性能
1. 位置编码
[35] Rahaman, N., Baratin, A., Arpit, D., Dr ̈ axler, F., Lin, M., Hamprecht, F.A., Bengio, Y., Courville, A.C.: On the spectral bias of neural networks. In: ICML (2018)
神经网络倾向于学习低频函数 [35]。输入网络之前,把输入信号映射到高维空间可以帮助网络更好的适应高频变化。这个观点在 Transformer 的文章中多次被使用,即位置编码(Positional encoding)。具体做法如下:
对于输入的三个位置坐标 \mathbf{x}=(x,y,z) 和观测角度 \mathbf{d}=(\theta, \phi), 他们的取值范围归一化到 [-1, 1]。对于每一个数值,例如 p\in\mathbb{R^1}, 通过函数\gamma(\cdot)映射到 \mathbb{R^{2L}} 空间中,这里L指的是编码的数量,对于位置坐标,L=10;对于观测角度,L=4。
\gamma(p)=\left(\sin \left(2^{0} \pi p\right), \cos \left(2^{0} \pi p\right), \cdots, \sin \left(2^{L-1} \pi p\right), \cos \left(2^{L-1} \pi p\right)\right)对比Transformer中的 positional encoder,Transformer主要是用它为Token提供离散的位置编码没有位置顺序的概念。而我们的位置编码,使用连续的空间位置作为输入,映射到了一个连续的高维空间。从而帮助后面的MLP网络封号的学习高频信息。
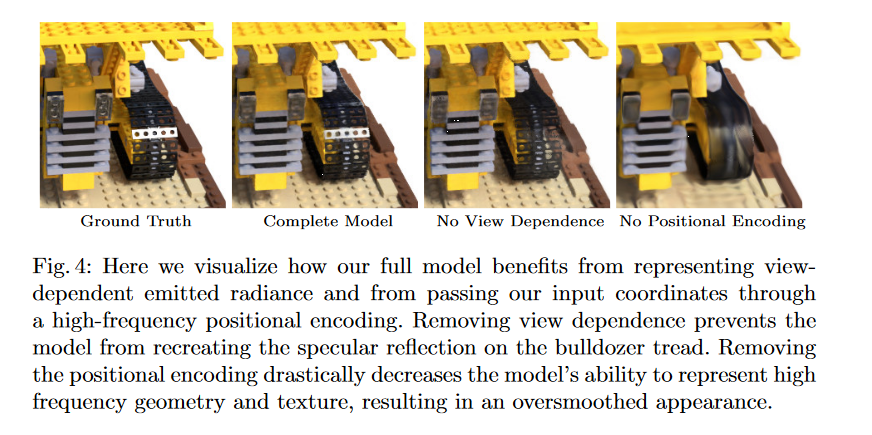
效果对比:
Complete Model V.S. No Position Encoding
2. 分层取样
分层取样(Hierarchical volume sampling):渲染的速度是一个关键的因素。 空白的空间 和 遮盖的空间 对于最终渲染出来的像素没有帮助,因而可以省略。
NeRF使用了两个网络进行优化:粗糙(coarse)和 调整(fine)。首先,在一条光线上,使用分层抽样(stratified sampling)抽样 N_c 个点,使用coarse网络推理,重写之前的体素渲染公式:
分层随机抽样:一般地,按一个或多个变量把总体划分成若干个子总体,每个个体属于且仅属于一个子总体,在每个子总体中独立地进行简单随机抽样,再把所有子总体中抽取的样本合在一起作为总样本,这样的抽样方法称为分层随机抽样,每一个子总体称为层。
摘自: https://zhuanlan.zhihu.com/p/478685602

这里权重是归一化的概率分布密度(PDF)。我们再使用逆变换采样(inverse transform sampling)抽取 N_f 个点,放入fine网络进行推理。 这样总共可以得到 N_c+N_f 个点。然后再使用前面体素渲染的公式对这N_c+N_f 个点进行计算,得到最终的像素值。
逆变换采样:如何通过均匀分布来采样服从目标函数(体素密度分布)分布的样本集。
https://blog.csdn.net/anshuai_aw1/article/details/84840446
具体实现
在每次优化迭代中,随机从数据集中选取一组从相机射出的光线(ray),然后采样N_c和N_c+N_f个样本分别训练coarse和fine网络。基于体素渲染的方法, 得到像素值和ground truth 对比计算 MSE loss。进而训练神经网络。
具体的,batch size 是4096个光线,N_c=64,N_f=128。优化器是Adam(\beta_1=0.9, \beta_2=0.999, \epsilon=10^{-7}), 学习率 5 \times 10^{-4}等。整个训练需要100-300k 次迭代(细节请参照论文)。